|
国内首发!2022年中国协作机器人技术发展报告,探索协作机器人技术应用与发展趋势!
作者:系统管理员
发布日期:2022-06-23
浏览次数:
随着制造业的转型升级,许多复杂生产工作需要人机协作来共同完成,而传统工业机器人因体形大、安全性和灵活性较低等问题,难以满足市场需要。协作机器人凭借安全、灵活、易用等诸多优势,可以弥补传统工业机器人应用范围的局限性,在降低生产成本的同时提高生产效率和质量,成为未来智能制造发展的关键。 基于此,机器人行业高端智库——立德智库携手全球柔性智能机器人领跑者——JAKA节卡机器人,联合发布了《2022年中国协作机器人技术发展报告》,并于2022年6月22日下午14:00-16:00开展线上发布会。 来自上海交通大学、北京理工大学、上海机器人产业技术研究院、立德机器人研究院及节卡机器人的多位行业专家云出席发布会现场,共同探讨了协作机器人行业的发展情况,对协作机器人行业的过去、当下与未来进行了总结和预估。
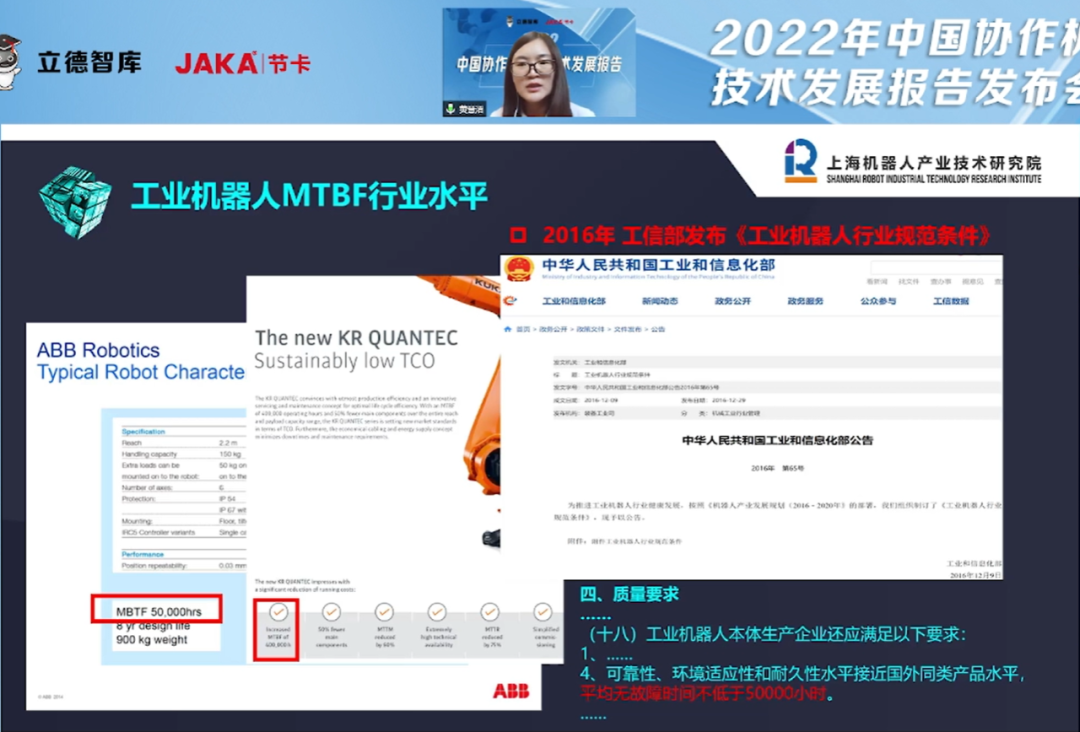
该份公开发布的报告亮点纷呈,着重围绕协作机器人专利申请情况、标准情况等至关重要的问题进行深度展开,多位专家从自身角度与认知出发,论述了协作机器人在机械臂结构设计、基础前沿技术等多方面的可能性。本文摘取了报告中的部分核心观点以餮读者。 ▍报告4大关键看点看点一:专利申请持续升温,技术创新迎来更大突破 机器人产业发展的关键是提升其核心竞争力,技术创新和突破又是提升核心竞争力的关键。立德智库数据显示,近些年,全球协作机器人领域专利申请数量持续快速增长,申请数已超3400件,而中国是专利申请数量最多的国家,超过2500件,且整体呈上升趋势,这正是协作机器人在国内市场快速崛起、逐步被市场认可的时期。未来,协作机器人专利申请数量还将进一步增加,申请范围也会随着市场应用逐步扩展。 以节卡机器人为样本可以发现,企业获取专利数与其行业地位正相关。节卡机器人近几年专利申报总数超过300个,在国内协作机器人企业专利申报上位居首位。从节卡机器人专利申报类型来看,主要集中在发明专利和实用新型专利的申报,专利质量相对较高,这与近两年节卡机器人在精度、负载、臂展方面超过国内外协作机器人产品,引领协作机器人行业发展相呼应。 看点二:认证体系逐步完善,部分企业领跑 MTBF认证是衡量机器人质量和可靠性的重要参考依据,目前在军工、航天等行业已得到广泛认可。在机器人领域,MTBF认证主要集中在20000-30000小时,仅节卡机器人率先实现30000小时、50000小时MTBF认证,领跑行业。 SEMI S2认证对设备的机械设计安全、电气安全、人体工学、紧急停止、危险告警等有严格的测试标准。对于协作机器人,SEMI S2认证也重点审核碰撞防护、辐射安全等安全措施。目前,以节卡机器人为代表的少数协作机器人头部企业获得SEMI认证,致力于提升产品质量的同时保证协作机器人使用的安全性。
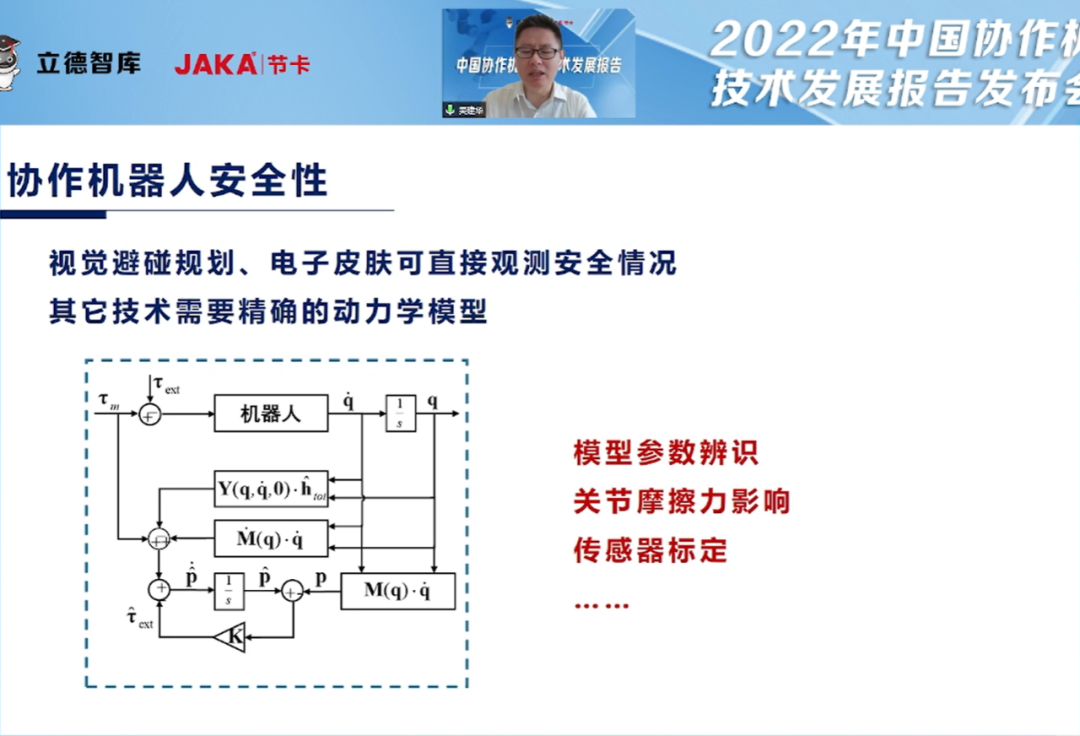
看点三:安全技术应用突出 现有的协作机器人安全技术主要通过事前主动预防和事后控制来保证。事前主动预防主要是在协作机器人上安装超声波、视觉、光电等传感器来实时检测判断机器人与障碍物之间的相对位置,采取适当的控制措施防止碰撞发生。 事后控制是针对人和协作机器人发生碰撞时采取的安全保护措施,主要通过设计轻型机械臂、机械本体增加弹性材料、设计柔顺关节,采用力/位混合控制,使用力觉、触觉等传感器检测碰撞方法来降低碰撞冲击力,防止对人造成二次伤害。目前,节卡机器人主要通过“视觉防护+碰撞停止+卸力回弹+防夹推拉”来实现多重安全防护,帮助客户提升产品在全生命周期中的安全性,最终实现安全可靠的生产目标。 看点四:前沿技术领域研究与应用增多 协作机器人近年能够成为主要研究热点,并被广泛关注,离不开协作机器人相关核心技术的研究与推动应用。在协作机器人前沿技术领域,小型化、轻量化的新型机构和材料研究将进一步提升协作机器人的运动性能,同时驱动方式、传感多模态和仿生控制等也是协作机器人前沿领域重点关注的内容。 感知与认知技术、人机交互技术和碰撞检测技术等将快速推动协作机器人的自主性、柔顺性、安全性与舒适性。以节卡机器人为代表的协作机器人企业通过钻研前沿技术和打磨应用技术,率先步入柔性智能机器人赛道,在协作机器人安全、便捷、易于部署等基础上重建机器人“大脑”,以先进的视觉处理、AI技术和云计算加持,使之更智慧地处理外部场景,真正适应快速、多变而复杂的大规模定制生产。 ▍4大前沿发展趋势预判前沿发展趋势一:智能感知——多学科交叉融合 感知是协作机器人与人、协作机器人与环境、以及协作机器人之间进行交互的基础。就感知技术而言,除了多传感信息融合之外,协作机器人越发呈现出与脑神经科学、生物技术、人工智能、认知科学、网络大数据技术等深度交叉融合的态势。未来的研究方向为主动感知与自然交互理论及方法,更多传感器的加入,使协作机器人能够理解人类指令(通过声音、手势、图形)。基于对复杂动态环境下知识的主动获取、学习与推理方法、视觉认知与基于动态环境的主动行为意图理解与预测理论、协作机器人的自主学习与机器人知识增殖方法、以及多模态人机协作的态势感知与自然交互方法的研究,实现协作机器人与人之间相互的意图理解、信息交流,以及自然和谐的情感交互。
前沿发展趋势二:自主认知——复杂环境灵巧作业 高度智能是对新一代协作机器人的重大共性技术需求。当前协作机器人应用面越来越广,在复杂作业能力、自适应可重构的装配能力、对非结构化环境的感知能力,以及与人协作能力方面需要更加智能化。协作机器人应用于在商业服务市场,主要挑战包括自然交互、人机安全、环境适应、复杂灵巧作业等方面,智能化是应对挑战的可行技术途径。 |