|
MIT团队设计改进新型人造肌肉材料,驱动飞行器实现高精度飞行
作者:系统管理员
发布日期:2022-04-02
浏览次数:
介电弹性体致动器(Dielectric elastomer actuator,简称 DEA)能够基于电场驱动直接把电能转化成机械能,用于软体机器人的“肌肉”制作。不过,相较驱动刚性机器人的压电双晶片和电磁电机等刚性执行器,市面上大部分DEA的功率密度和寿命都较低,且需要较高的驱动电压。 为此,来自麻省理工学院(MIT)的研究团队设计了一种“基于并联多层电极材料技术、具有低驱动电压、强耐久性”的新型 DEA,不仅能够提升微型飞行器的动力,而且使其各方面表现都优于当前同尺度下的其它飞行器。 相关论文以《一种由低压长寿命 DEA 驱动的高升程微型空中机器人》(A High-Lift Micro-Aerial-Robot Powered by Low-Voltage and Long-Endurance Dielectric Elastomer Actuators)为题发表在 Advanced Materials 上,并被选为该期刊的封面文章。
图片来源:Advanced Materials 据了解,集成该DEA的空中机器人在现有亚克级(sub-gram)空中机器人中性能最好、飞行时间最长,其悬停时间达到20s,位置和姿态误差分别小于2.5cm和2°,并实现了超过 200万次驱动循环的长使用寿命。 而且,该机器人在升力重量比(lift-to-weight ratio)方面也有所提升,从之前的2:1提升到了 3.7:1,是目前同尺寸下能达到的最好性能。 论文第一作者任智健称,之所以能达到这样的突破,归功于进一步降低了DEA每一层弹性聚合物(Elastomer)的厚度。 此外,该团队针对DEA驱动电压较高的问题做出了努力。此前DEA需要达到接近2000V的工作电压才能使机器人完成起飞,而他们最新研制的DEA只需要大约500V的工作电压。 研究人员表示,从材料角度出发,降低电压就是要在减小每层弹性聚合物厚度的同时,增加相应的层数。虽然思路很容易被想到,但具体操作起来就会有各种各样的问题。 比如,层数增加会使得烘烤聚合物的时间增长,驱动器的整体制作时间也成倍增长,不利于进一步减小厚度;而且,随着厚度的减小,弹性聚合物中的气泡很容易在通电测试的过程中被击穿,从而导致驱动器整体性能的下降。
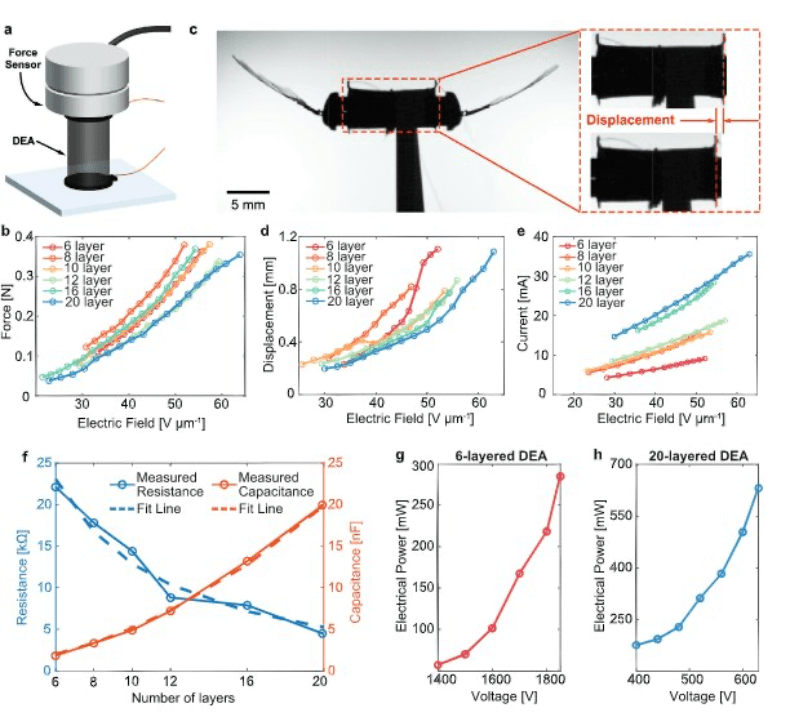
DEA性能表征 图片来源:Advanced Materials 面对这些问题,该团队进行了反复的制作工艺调整和样品测试,同时引入了一些针对性的解决措施,比如在每层弹性聚合物旋涂后立即抽真空来大幅减少气泡,以及多次放入烤箱等具体加工工艺细节。在不断的摸索与尝试过程中,他们最终找到了比较稳定的加工工艺。 随后,他们还进行了各种对比测试,如静态扇翅测试、动态升力测试和最后的飞行器起飞测试等。通过这些测试,研究人员获得了完整的数据,证明其最新加工工艺的确提高了DEA和微型飞行器的整体性能。 任智健谈到,他们的大部分工作是在疫情期间完成的,所以其需要在有限的实验时间里尽可能多尝试不同的制作工艺,并对测试得到的数据加以分析,再去思考如何改进。
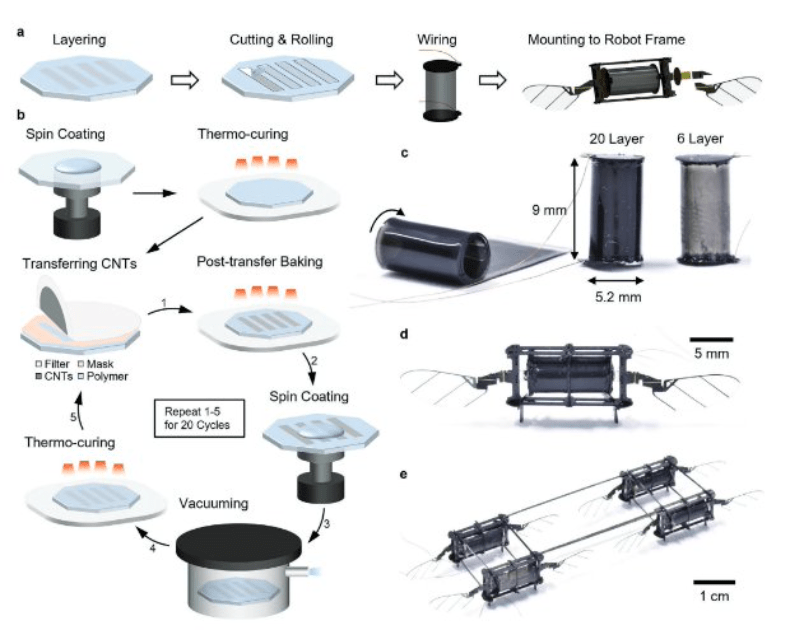
DEA制造和机器人组装 图片来源:Advanced Materials 值得一提的是,该研究在DEA和微型无人机领域都有着极其重要的意义,改进后DEA制作工艺虽然简单又传统,但十分有效。 据任智健表示,目前研发的DEA还处于实验室阶段,到实际应用还有一定距离。下一步,计划在现有基础上通过优化微型无人机的结构设计来增加其可控性。此外,他们还计划基于低工作电压设计出轻量化的供电电路,以达到无线化(untethered)飞行的目标。 未来,这种DEA驱动的微型飞行器可应用于救援搜索、复杂地形勘探以及农业播种等领域。 文章来源:DeepTech深科技 |