|
峰会展商|大象机器人
作者:系统管理员
发布日期:2022-10-13
浏览次数:
展 商 推 介 /大象机器人
大象机器人成立于2016年,是一家专注于机器人研发生产、平台软件开发及智能制造服务的高科技企业。核心团队由英、美、澳等海外学成归来的爱国人士组成,与墨尔本大学,俄罗斯国立核能研究大学,华南理工大学等高校,建立联合实验室并突破关键技术,帮助整体供应链国产替代,打造了从教育到专业级别的一系列协作机器人解决方案。 公司自创立之初便奠定了国际化视野与自主研发创新基础,由全球硬件孵化器HAX孵化,先后荣获云天使,SOSV,东方证券,深创投,真格等一线基金注资,以推动全球业务的快速增长。秉持“Enjoy Robots World”的愿景,大象机器人从生活乐趣和工作效率出发,已自主研发机器人产品包括:
第八届中国机器人峰会期间,大象机器人公司将携Marscat、metaCat、myBuddy双臂机器人、mechArm、myPalletizer 260 Pi、myAGV、MyCobot人工智能套装,Pro 600等8款产品亮相。 1.Marscat-世界首款仿生机械猫 四足运动 智能交互 火星猫是大象机器人研发的全球第一款仿生宠物猫,旨在成为一个家庭机器人,一个给你带来安慰和惊喜的机器人宠物。就像一只真正的猫一样,火星猫是完全自主的。 不需要额外的指令来控制它的运动。 火星猫 会走路、跑步、睡觉、坐着、伸展、咬指甲、揉捏甚至掩埋垃圾,尽管它不会产生任何废物。
2.metaCat米塔猫-人工智能时代的仿真陪伴机器猫 毛绒 宠物 metaCat米塔猫是一只仿生布偶猫,通过极逼真的毛发,交互和动作,它在外观、触感、体验感上无限贴近真实宠物,充分满足人类对情感方面寻求陪伴和治愈的需求。 大象机器人基于pyTorch深度学习框架,对超过100只猫进行的动作捕捉与处理。将真猫的自主运动与互动运动的运动角度、节奏与方向进行记录与分析。 metaCat模仿了真实的动物猫头部运动轨迹,达到与真实猫咪相似的活动状态,以实现极致的真猫运动方式。
3.myCobot myCobot 280 系列是世界最小最轻的六轴协作机器人,目前市场开源程度最高的千元级别6轴教育级机械臂,体积小巧但功能强大,具备丰富的软硬件交互方式及多样化兼容拓展接口,支持多平台的二次开发,从拖动示教,图形化编程到ROS/Moveit,Roboflow工业操作同平台。满足从机器人入门学习,到科学研究到专业场景应用。
4.myPalletizer 260 Pi-全球首款全包裹式的四轴机械臂 去鳍设计,外观全包裹,内嵌树莓派生态,1.5GHz 4核微处理器,强大的AI计算能力,开发无限可能。 零基础入门使用,图形化编程语言Blockly,让你轻轻松松开启机械臂使用之旅。四自由度的关节运动,260mm的运动半径,重复定位精度±0.5mm,协助实现您的理想控制。
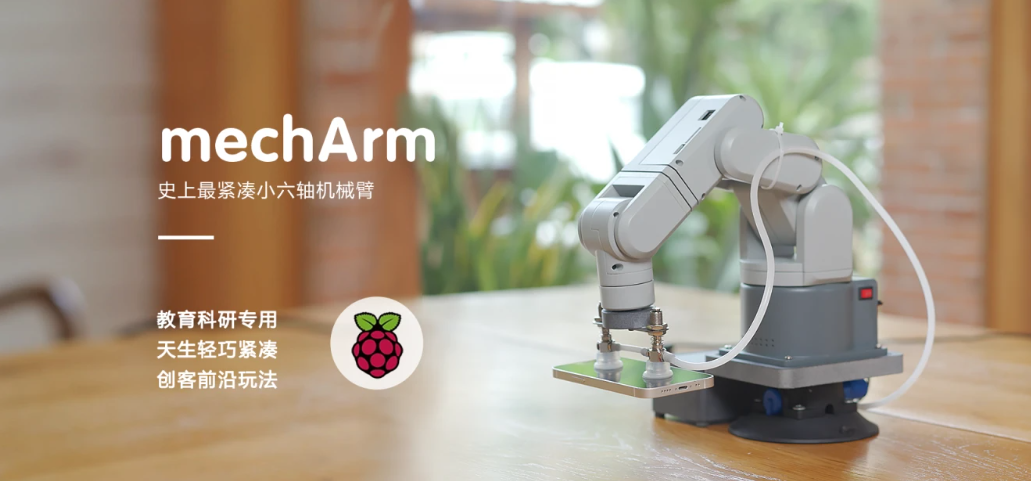
5.Mecharm小六轴-最紧凑的小六轴机械臂 史上最紧凑的小六轴机械臂,用于青少年学习人工智能编程,具有棋类对决,写字画画,语音控制,视觉跟踪,激光雕刻等创客界前沿玩法!全面开放的软件控制接口,依据科研教育等各类应用场景,全面开放控制接口,为你提供更全面、更具针对性的接口选择,满足你实现物品分拣、人脸识别、图像识别等AI场景需求。
6.Pro 600商用机械臂 myCobot Pro-600的设计初衷是向大家提供一款可以重复劳动的机器,采用树莓派微处理器,内嵌roboFlow可视化编程软件,是大象机器人面向教学及商用开发的机器“助手”。 本体重量8.8kg,其有效负载 2kg,工作半径600mm,精巧构思功能强大,操作简单且能与人协同安全工作。具有易用性、安全性和经济性三大优势,是高性价比之选,能够快速在工作环境上布署,可为高校及企业降本增效。
7.MyCobot人工智能套装 myCobot人工智能套装是集视觉、定位抓取、自动分拣模块为一体的入门级人工智能套装。基于Linux系统,在ROS搭建1:1仿真模型,可通过开发软件实现机械臂的控制,简单易学,能够快速入门学习人工智能基础知识,启发创新思维,领悟开源创意文化。 本套装扩展性好,开放性高,可以被用于多种用途。可易用专科院校的实训平台、机器人学科搭建、机器人实验室或个人学习与使用。
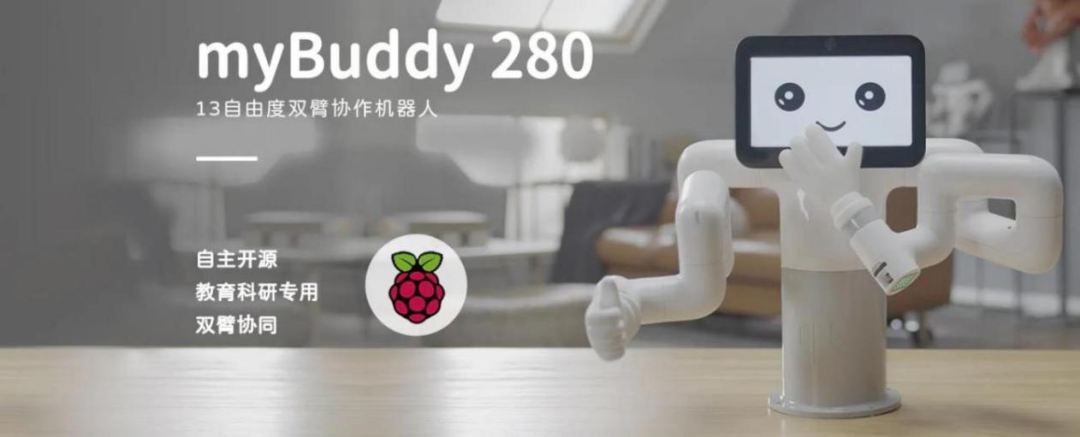
8.myBuddy双臂机器人-全球最小的双臂协作机器人 13自由度协作机器人,开放ROS仿真开发环境、内置运动学正逆解算法、基于本产品还可以进行商业展示、预研发场景融合等企业级应用,提供机器人应用相关套件及开发教程,有助于用户更加便捷开发使用;7寸可交互式显示屏幕,内置20+动态表情;支持 VR控制,虚拟现实结合,让控制更简单。全系列累计销售至全球60+国家,出货量超5000余台,随时随地开始你的智能制造机器人学习之旅!
9.myAGV—自主导航的灵巧4轮直驱小车 复合机器人,可搭载my系列机械臂,实现移动抓取扩展工作空间,完成更多任务。 全向移动,竞赛级麦克纳姆轮,全包裹金属车架,分体式结构可拆卸。 SLAM激光雷达,ROS开发平台内置gmapping、cartographer两种算法,激光雷达实时建图扫描,自动规划路径进行避障导航。
|