|
美国北卡罗来纳州立大学研究团队开发了一种仿猎豹的柔性机器人
作者:系统管理员
发布日期:2022-09-27
浏览次数:
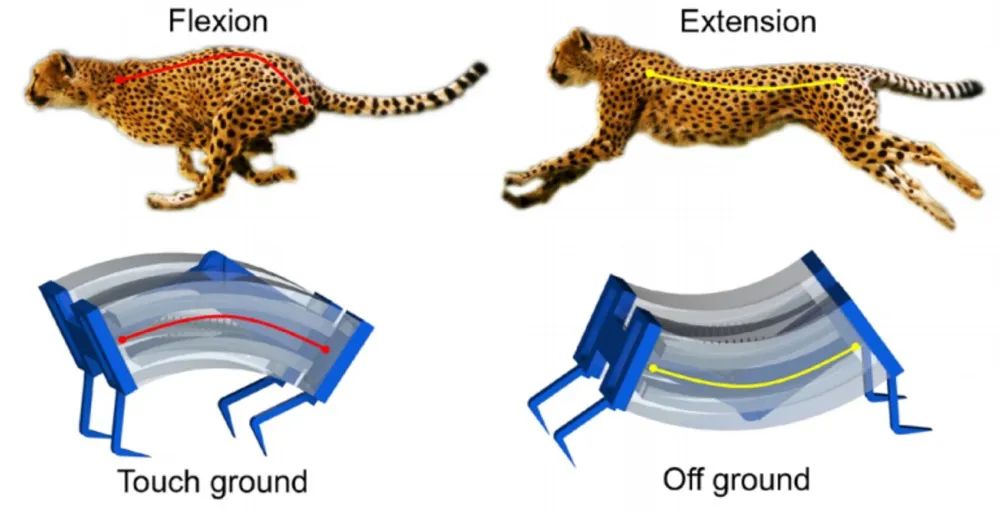
美国北卡罗来纳州立大学研究团队参考猎豹的生物力学结构设计了一种新型柔性机器人,该机器人在固体表面或者水下比先前的柔性机器人移动得更快。 杰英博士(音译)是该研究团队的一名工程师,他解释说:“猎豹是陆地上跑得最快的生物,它们通过脊柱弯曲来获得速度和力量,参考猎豹的生物力学结构,我们设计了一种弹簧驱动的具有双稳态脊柱的新型柔性机器人,该机器人拥有两种稳定状态,通过将压缩空气输入柔性机器人的管道中可实现这两种稳定状态之间的快速转换,该转换过程能够释放大量的能量,使得该机器人能够快速对地面施加作用力,从而获得较高的速度”。 此前,已知最快的柔性机器人可以在平坦固体表面上以每秒0.8个体长的速度运动,而北卡罗来纳州立大学研究团队提出的这种“基于弹性不稳定性性能增强(Leveraging Elastic instabilities for Amplified Performance,LEAP)”的新型柔性机器人可以以每秒2.7个体长的速度运动,速度提升了两倍以上。另外,该柔性机器人还能够在陡峭的斜坡上行走,这对于那些只能对地面施加较小作用力的机器人而言具有挑战性或者是不可能的事情。 该研究团队指出,该项目证明了一种可获得更快响应速度和更稳定作用力的柔性机器人概念模型,可以通过对该机器人的设计进行调整以满足不同的应用需求。杰英博士解释说:“在包括搜索和救援行动、工业机器人应用等一些潜在应用场景中,速度是至关重要的因素,想象一下,在生产线上机器人不仅速度快,还能很好地处理易碎物品。” 美国科学基金会资助了这项研究。该基金会的工程项目负责人Siddiq Qidwai补充说道:“在不远的将来,柔性机器人将与人密切互动,并且能够在搜救行动中提供一些基本的服务。这项创新研究使用双模稳定的概念,使得这些场景更加容易实现,让机器人能够像人类一样拥有各种功能,比如跑步、游泳、抓取和提起物体”。
图1 仿猎豹的柔性机器人
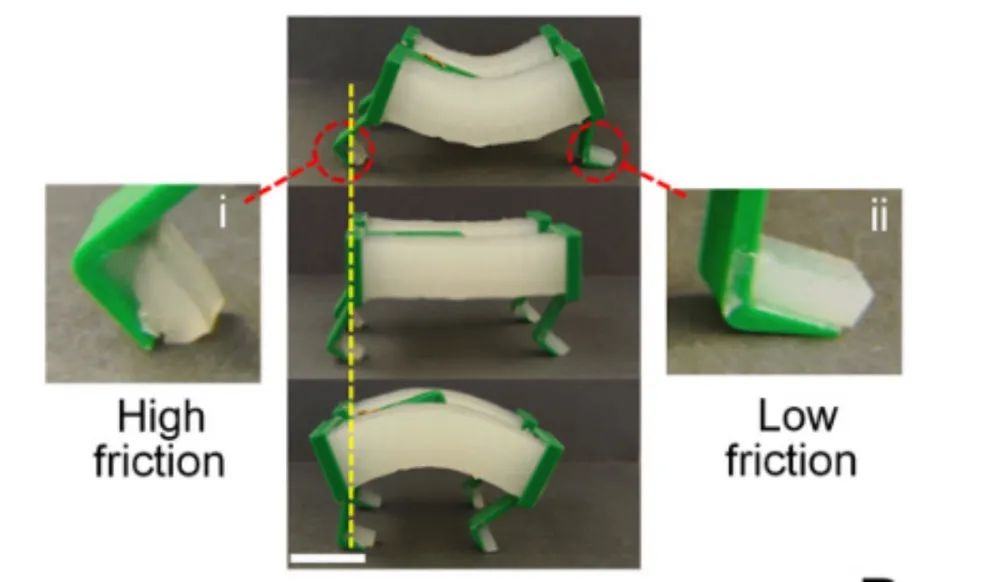
图2 仿猎豹柔性机器人的行走过程
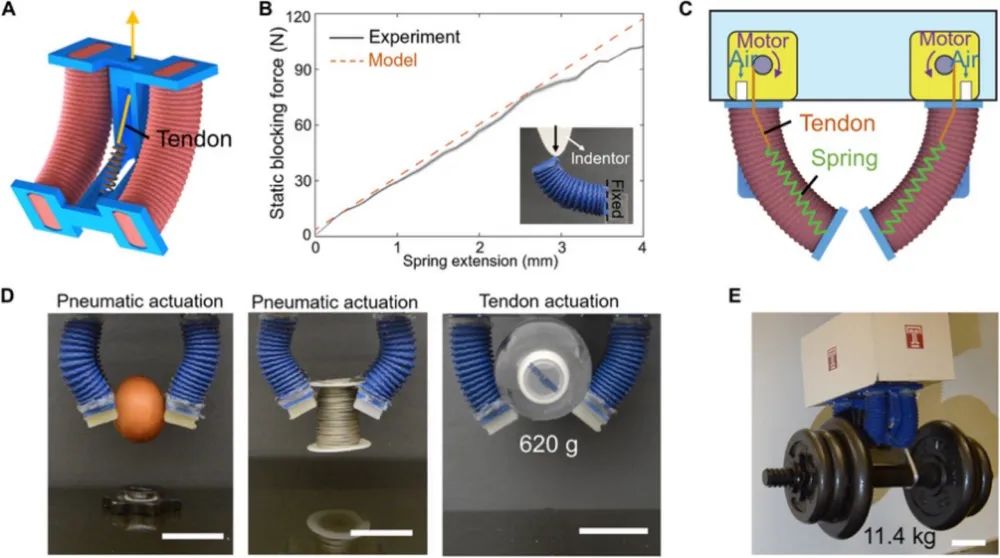
图3 可应用于抓取和提取物体的柔性机器人 注:摘自《National Science Foundation》 |